Intelligent Mobile Robot
Intelligent Navigation System of Mobile Robot.
![]()
Reference to:
Valentyn N Sichkar. Intelligent Navigation System of Mobile Robot // GitHub platform. DOI: 10.5281/zenodo.1317906
Related works:
-
Sichkar V.N. Comparison analysis of knowledge based systems for navigation of mobile robot and collision avoidance with obstacles in unknown environment. St. Petersburg State Polytechnical University Journal. Computer Science. Telecommunications and Control Systems, 2018, Vol. 11, No. 2, Pp. 64–73. DOI: 10.18721/JCSTCS.11206 (Full-text available also here ResearchGate.net/profile/Valentyn_Sichkar)
-
The investigation of Reinforcement Learning for the tasks of shortest path planning is put in separate repository and is available here: Reinforcement Learning in Python
-
The research results for Neural Network Knowledge Based system for the tasks of collision avoidance is put in separate repository and is available here: Matlab implementation of Neural Networks
-
The study of Semantic Web languages OWL and RDF for Knowledge representation of Alarm-Warning System is put in separate repository and is available here: Knowledge Base Represented by Semantic Web Language
-
The study of Semantic Representation of knowledge and querying of it through owl files with SPARQL is put in separate repository and is available here: System programming for SPARQL querying with interface development by html files
-
The study of Neural Networks for Computer Vision in autonomous vehicles and robotics is put in separate repository and is available here: Neural Networks for Computer Vision
Description
Hardware - Arduino Mega, Motor Shield L298P, DC Motors, Ultrasonic Sensors, Gyroscope, Laser Sensors, Cameras, Lidar Sensor, Bluetooth Module, Batteries, Six Wheel High Pass Base with Active Suspension.
Software - C# via Visual Studio, Python, Arduino IDE, Android SDK, Matlab.
Developmet - Algorithms for Overcoming Obstacles, Algorithms for Localization, Algorithms for Mapping, SLAM Algorithms.
Content
Codes (it’ll send you to appropriate folder on GitHub):
Experimental results (figures and tables on this page):
- Introduction
- Connecting DC Motors
- More information about equipment
- Adding FIVE Ultrasonic sensors US-015
- Checking the abilities to stop before the possible collisions with obstacles
- Adding TEN Ultrasonic sensors HC-SR04
- Connecting two Arduino Mega together
- Checking the abilities to overcome obstacles
Introduction
Explaining the main goals of the Project
Connecting DC Motors
Connecting and checking the High Pass Six Wheel Base - HPSWB - for simple commands to move
More information about equipment
General view of the Motor Shield L298P is shown below on the figure
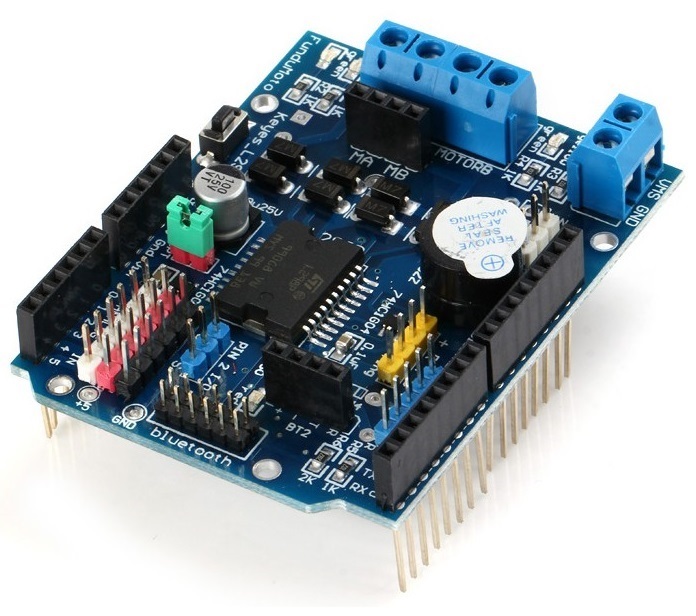
The view from the top of Motor Shield L298P and showing the main connectors that are needed for the Project.
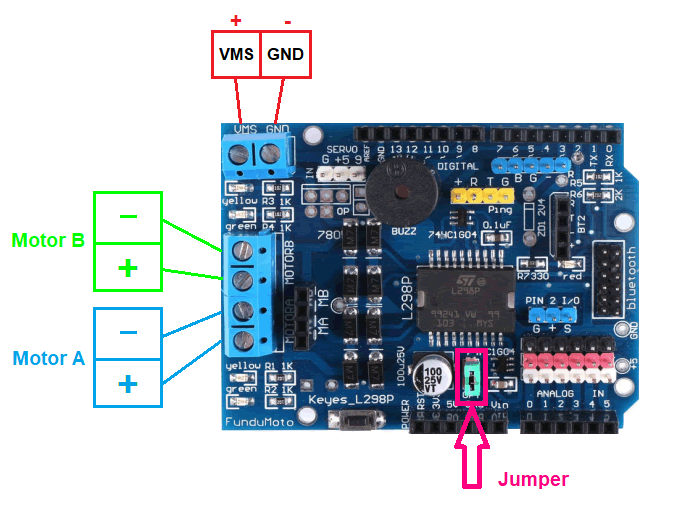
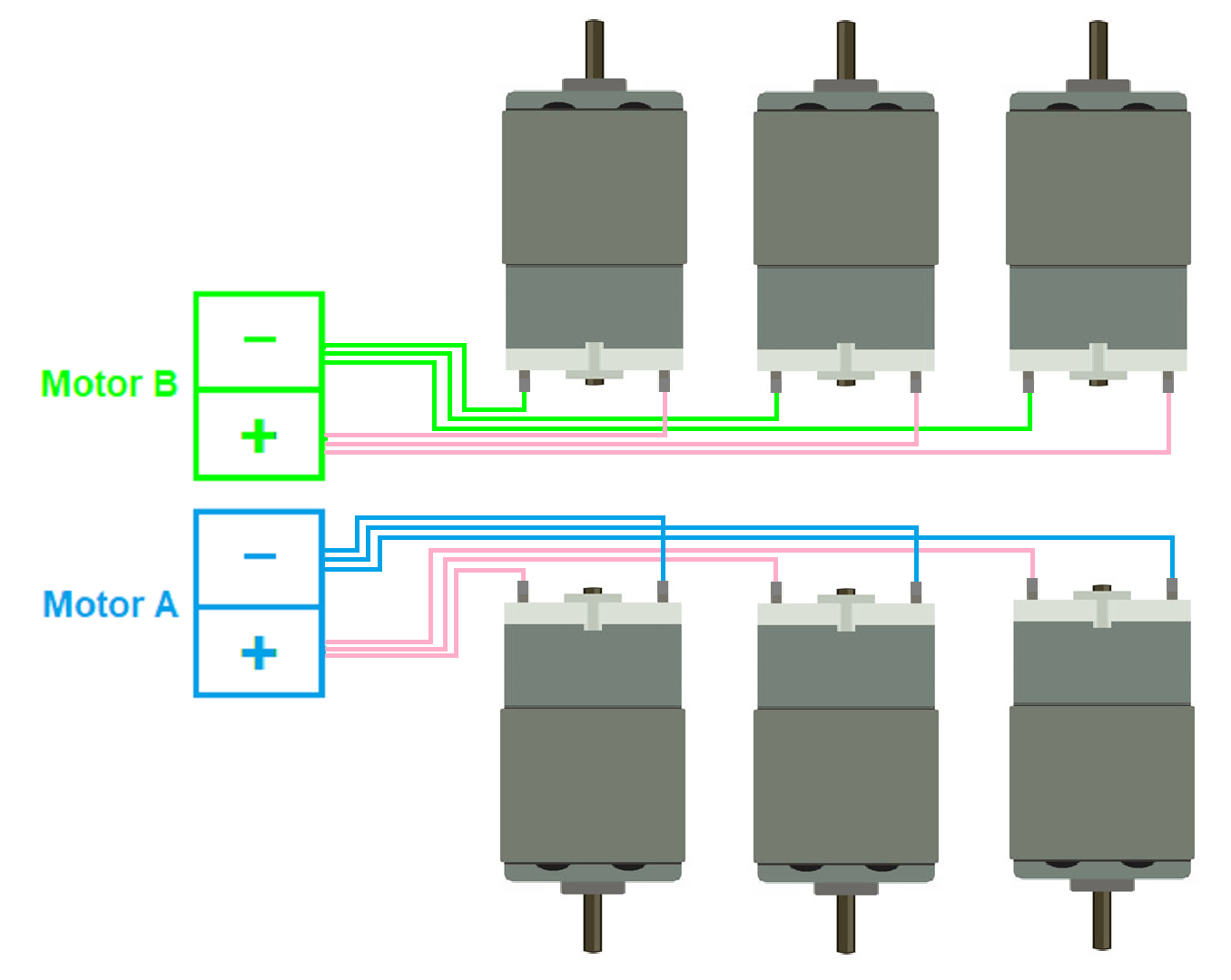
General view of the DC Motor

Connection DC Motors to the Shield
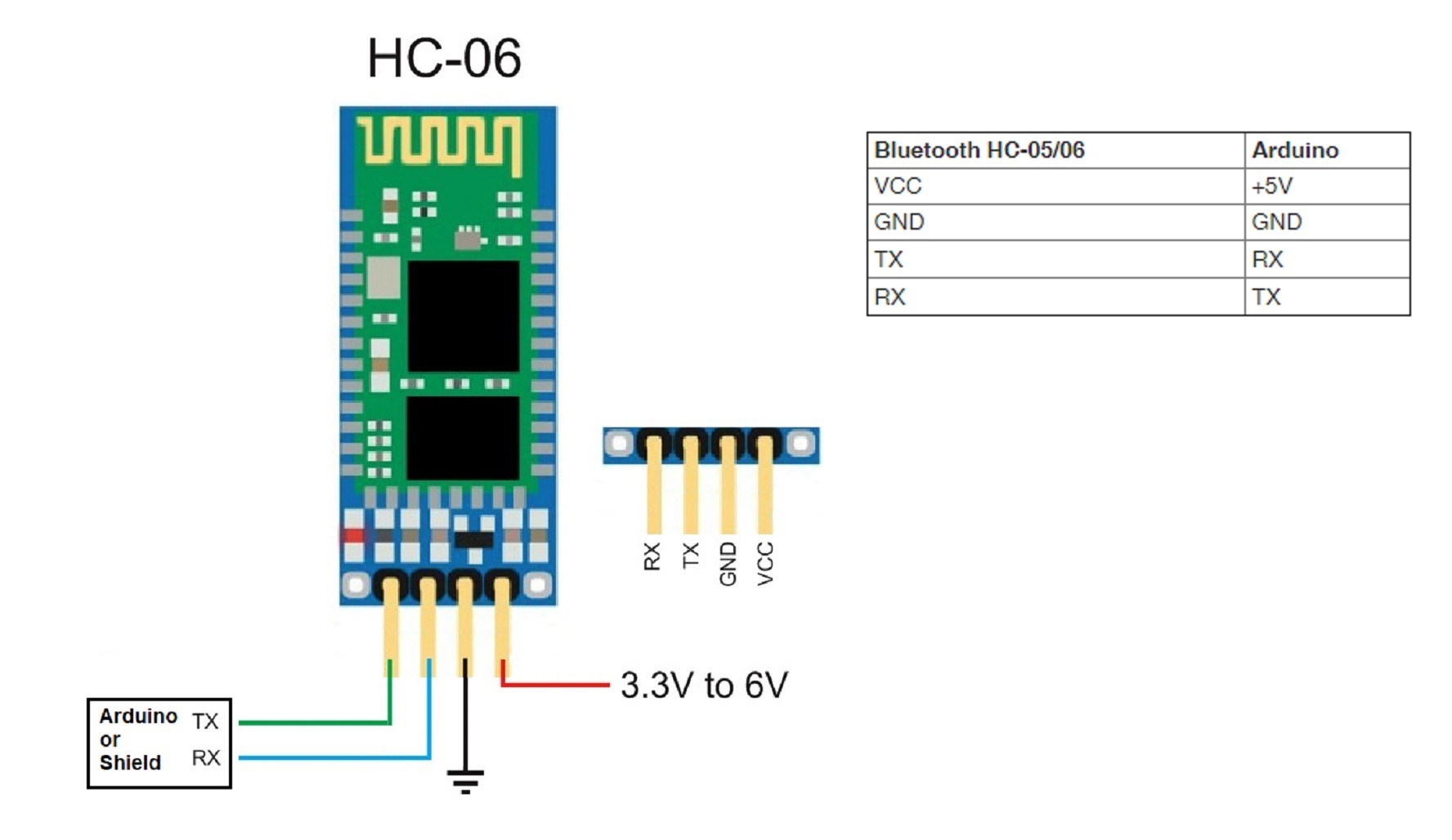
General view of the Bluetooth Module HC-06
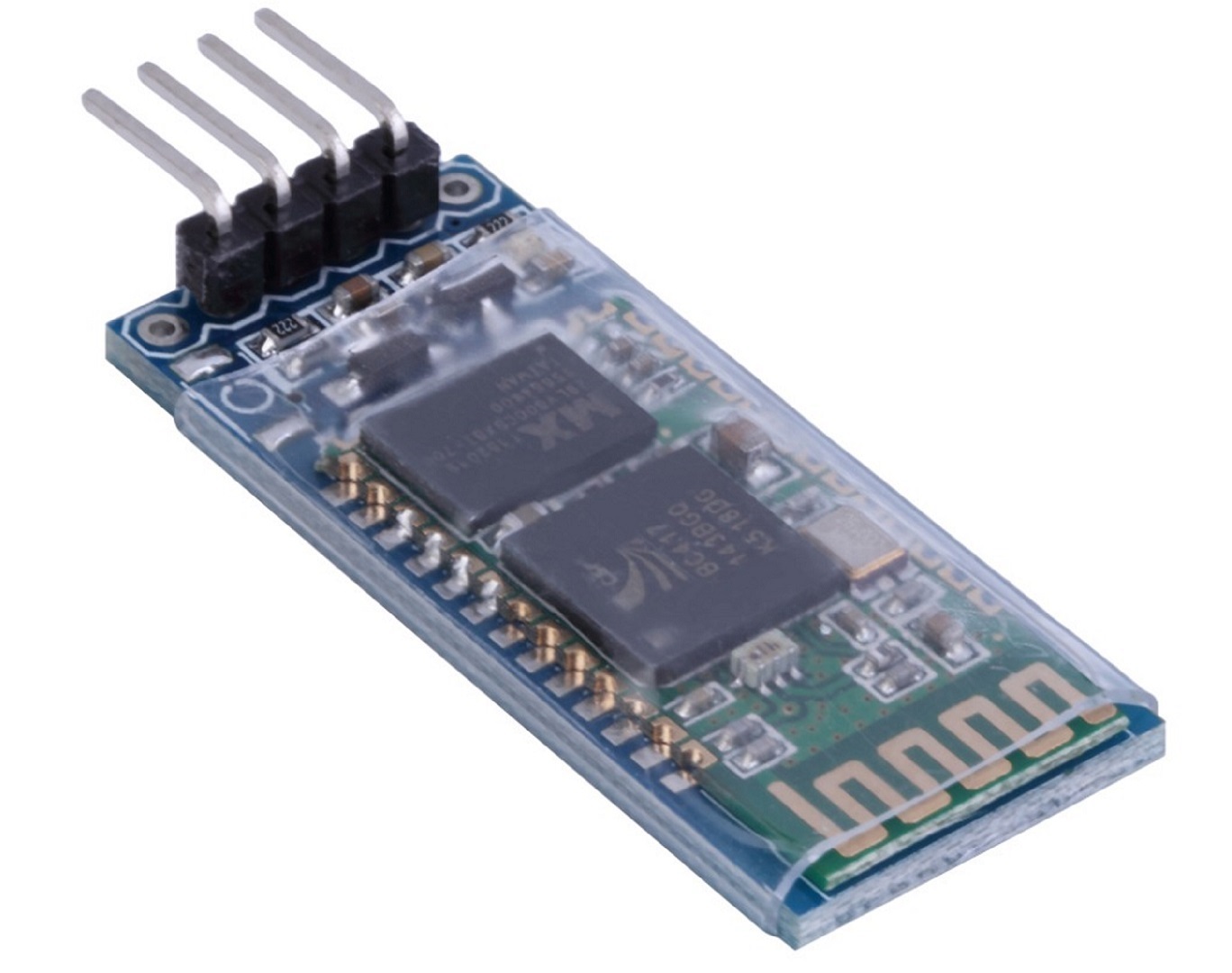
Connection Bluetooth Module HC-06 to the Shield or Arduino
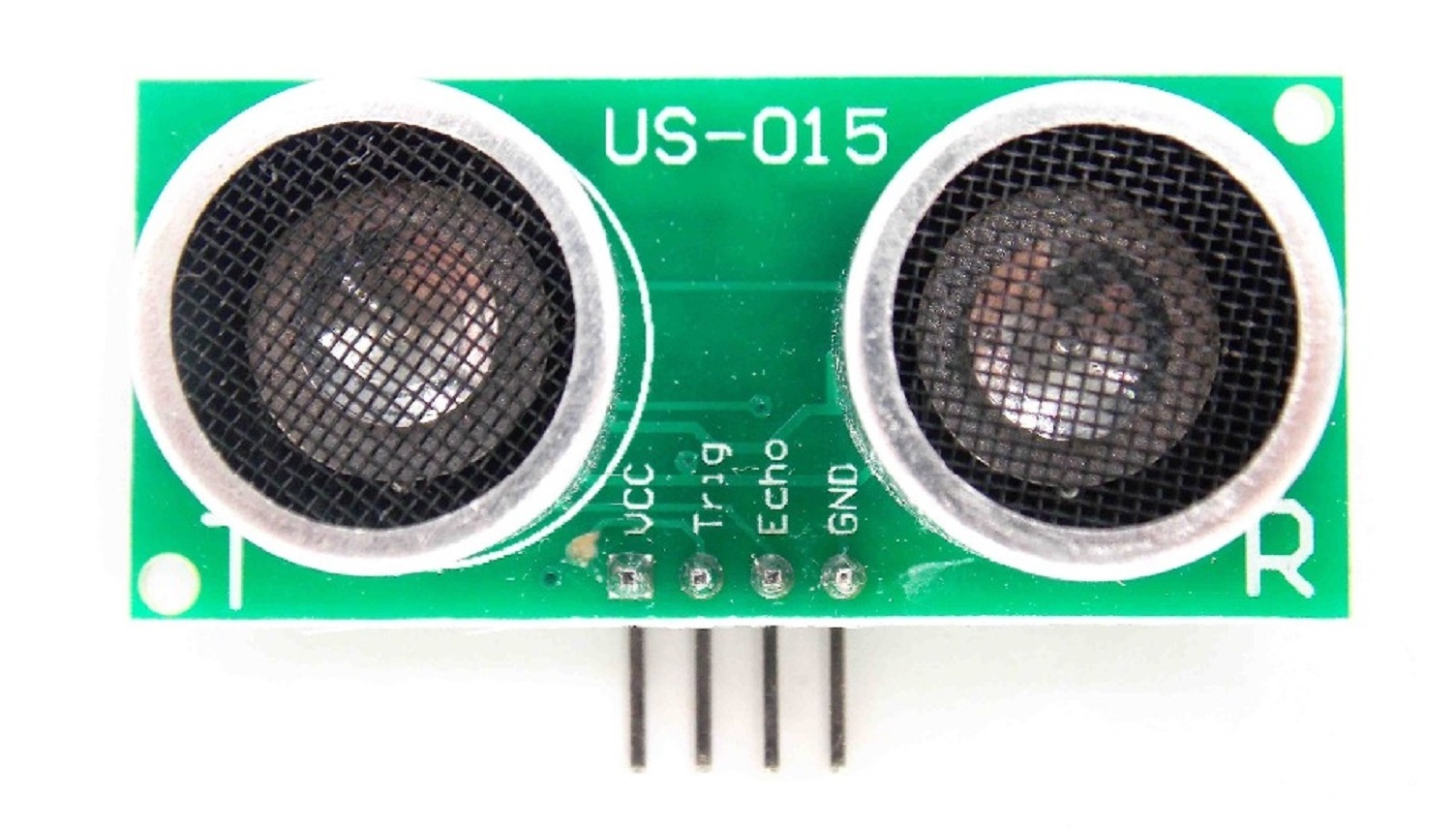
General view of the Ultrasonic Sensor US-015
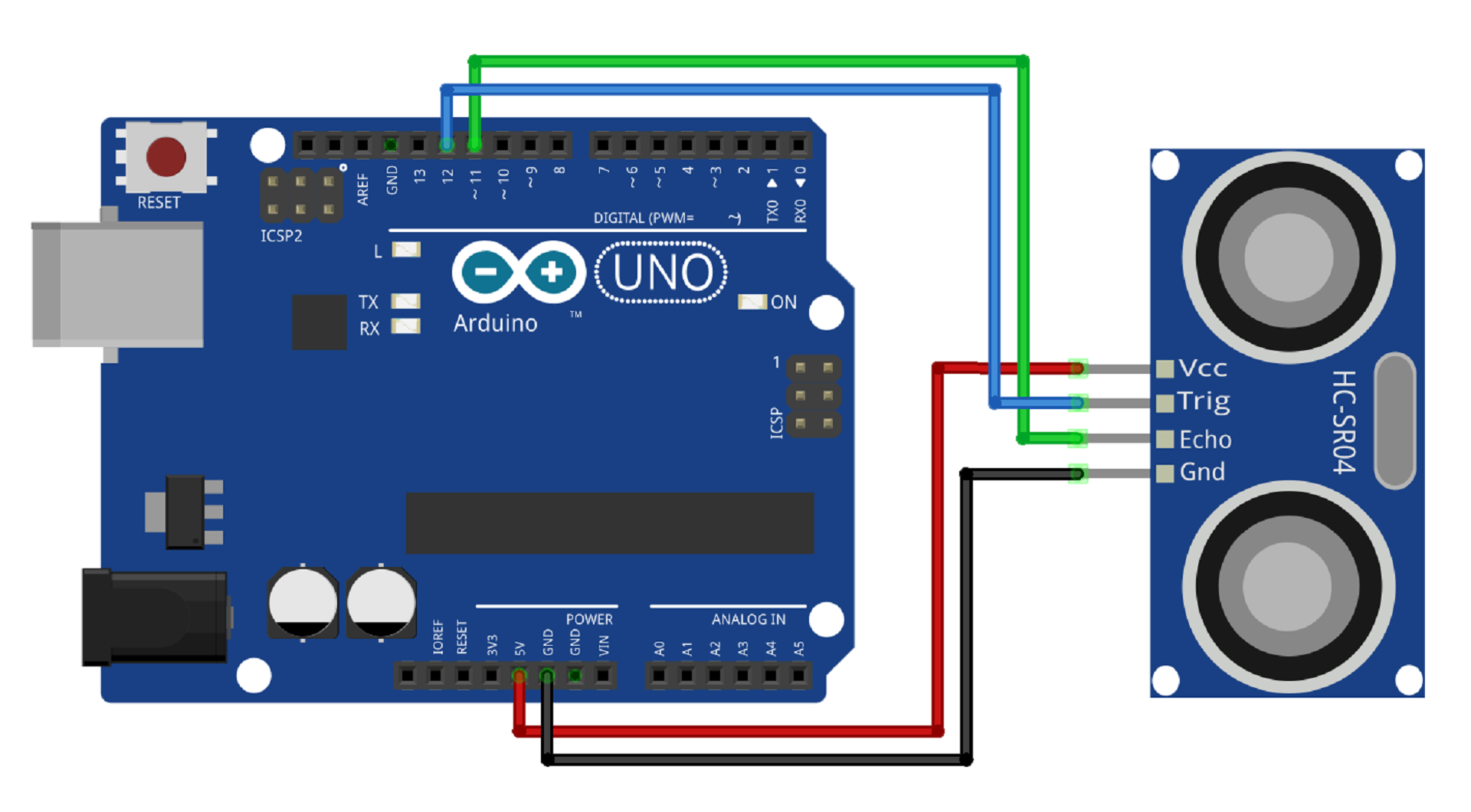
Connection Ultrasonic Sensor US-015 (or HC-SR04) to the Arduino
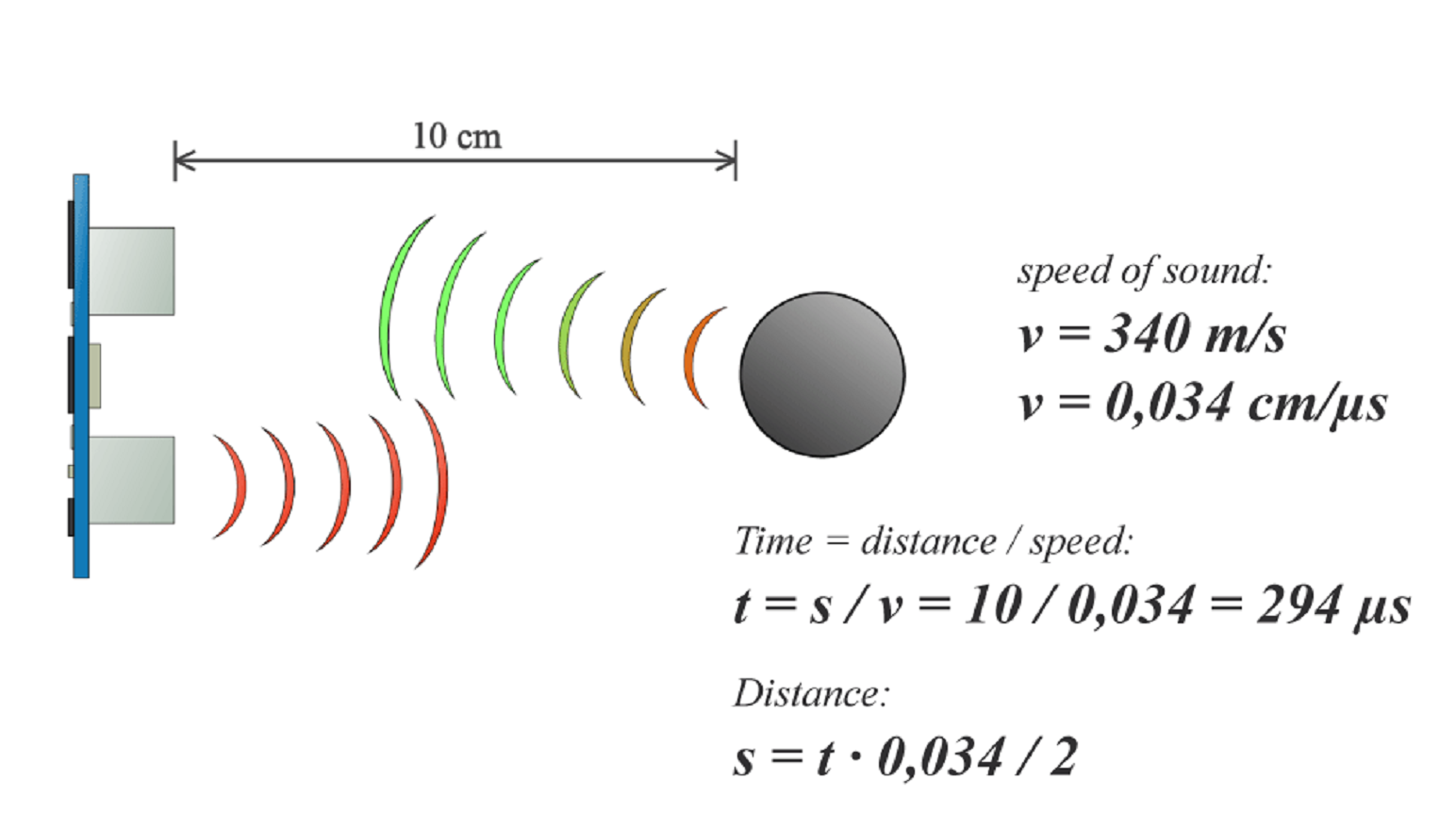
Equations for Ultrasonic Sensors, explaining how they work
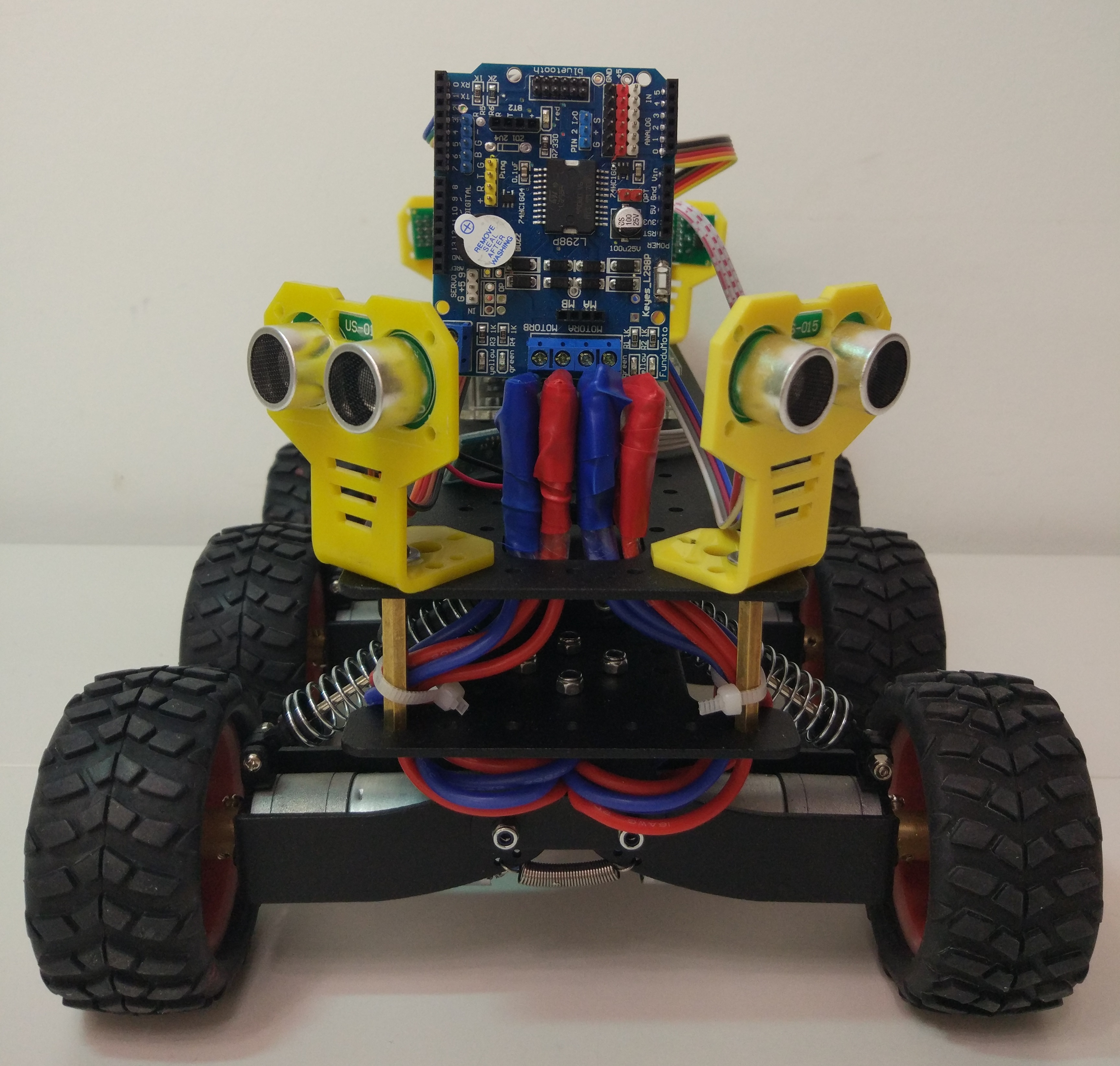
Adding FIVE Ultrasonic sensors US-015
Checking the environment around with Ultrasonic Sensors US-015
HPSWB with Ultrasonic Sensors - view from the front

HPSWB with Ultrasonic Sensors - view from the back
HPSWB with Ultrasonic Sensors - view from one side
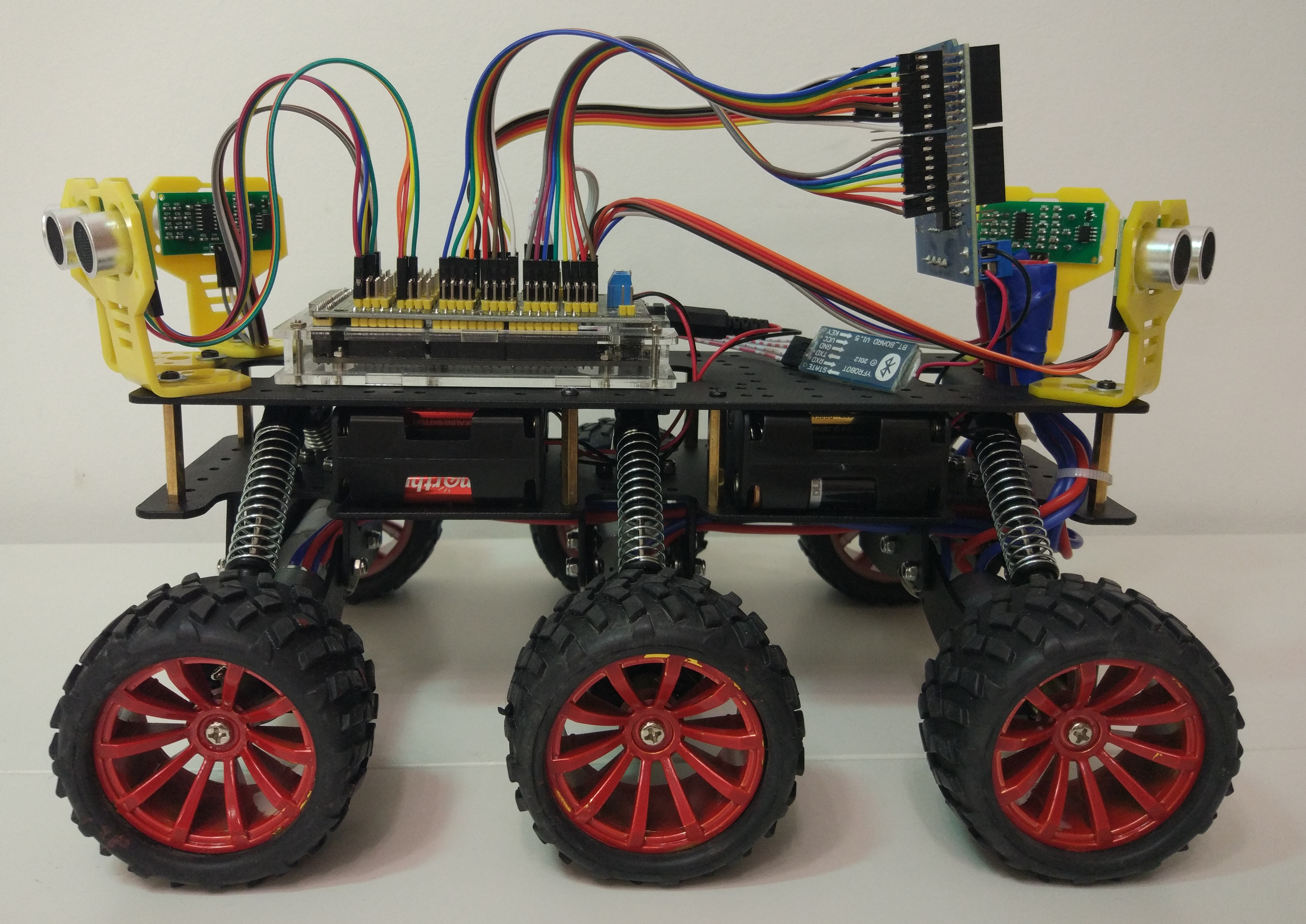
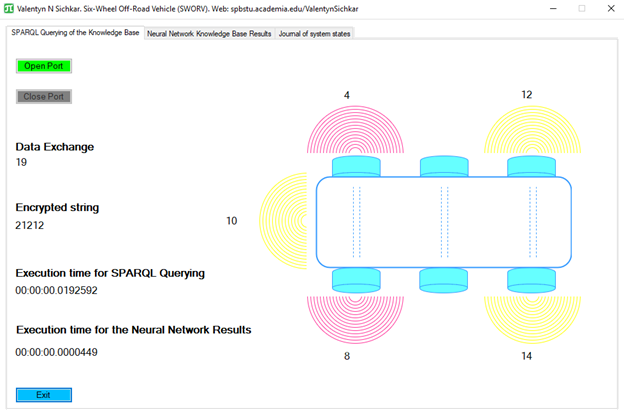
Figure below shows the results of working system in Real Time by SPARQL Querying of the Knowledge Base
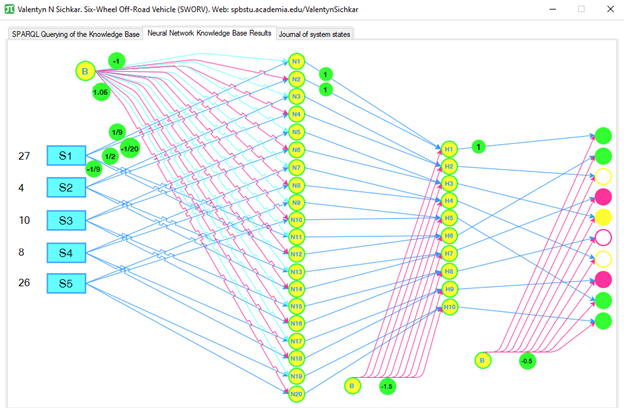
This figure shows the results of Neural Network Knowledge Base
Checking the abilities to stop before the possible collisions with obstacles
With the help of Ultrasonic Sensors and seeing the obstacles to avoid the collisions
Adding TEN Ultrasonic sensors HC-SR04
Checking the environment around with Ten Ultrasonic Sensors HC-SR04
HPSWB - view from the front


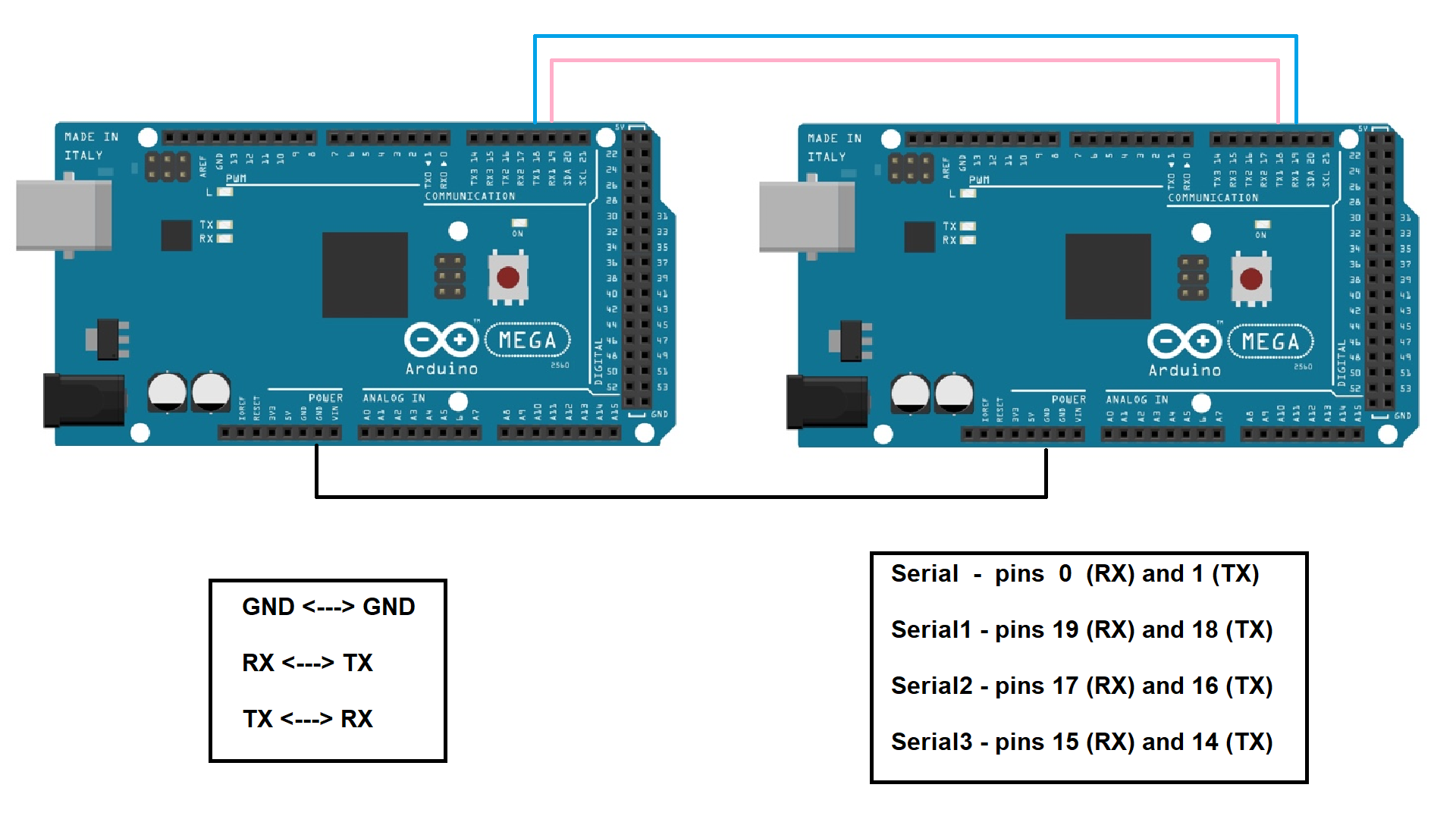
Connecting two Arduino Mega together
The way how to connect Master and Slave Arduino Mega together through Serial Port
Checking the abilities to overcome obstacles
Implementing and testing Algorithms for HPSWB

MIT License
Copyright (c) 2018 Valentyn N Sichkar
github.com/sichkar-valentyn
Reference to:
Valentyn N Sichkar. Intelligent Navigation System of Mobile Robot // GitHub platform. DOI: 10.5281/zenodo.1317906